你真的了解can与诊断吗?14229、1898、J1939有什么区别与联系?

知识性|故事性|趣味性
今日语录:生命中最好的事情就是找到那个知道你所有的错误和缺点,却依然认为你非常棒的人。
前言
两年前,我写过一篇文章车内通信技术有哪些?CAN、LIN、以太网(SomeIP、DoIP)等,主要介绍了车内的一些通信技术,当时阅读量有2000多。
在扩宽个人知识面的同时,也能与行业内的人互相学习,共同进步,让我觉得做这个公众号是有价值的。

进入汽车行业以来,我对can通信、诊断时有接触,但因为不是专业搞这方面的,所以有时候总是会把一些标准搞混淆。
利用周末时间,我把行业内常见的can通信、诊断协议进行了梳理,希望能对大家有所帮助。
这些标准在ISO官网下载,一份就要100多元,好在我从朋友那里都搜集到了,现在免费分享给大家。(感谢贡献标准的朋友!)
获取方法:在后台直接发送对应标准的编号(如:11898),会弹出一个链接,点进去免费下载即可。
做汽车电子产品开发,一定会接触到ISO11898、UDS诊断、ISO14229等,但你知道他们之间有什么区别与联系吗?
既然已经有ISO11898了,为什么美国汽车工程师协会(SAE)又要搞一个SAEJ1939出来?
诸如此类的问题,我之前也不知道,今天,我们一起把他们搞清楚。

常见can与诊断协议分类
1.CAN通信协议:汽车的"国际通行证"
要想把上面这些问题搞清楚,先得从CAN的起源说起。
汽车上为什么需要CAN总线?
CAN总线出现之前,汽车上各个ECU之间是点对点通信的,这种通信方式必然会使汽车线束变得十分庞大、复杂!
据统计,一辆采用传统布线方法的高档汽车中,线束长度高达2000米!
而且,随着汽车电子技术的快速发展,ECU越来越多,这进一步加剧了线束系统给整车带来的空间及成本压力。
为了解决多个ECU之间的复杂通讯问题,从1980年初开始,博世的工程师考虑将其他行业的总线系统引入汽车行业。经过评估,并没有可用的网络协议能够满足汽车行业的需求。于是,博世于1983年开始开发新的串行总线系统。
这种新的总线系统就是我们后来熟知的CAN总线(ControllerAreaNetwork,控制器局域网)。
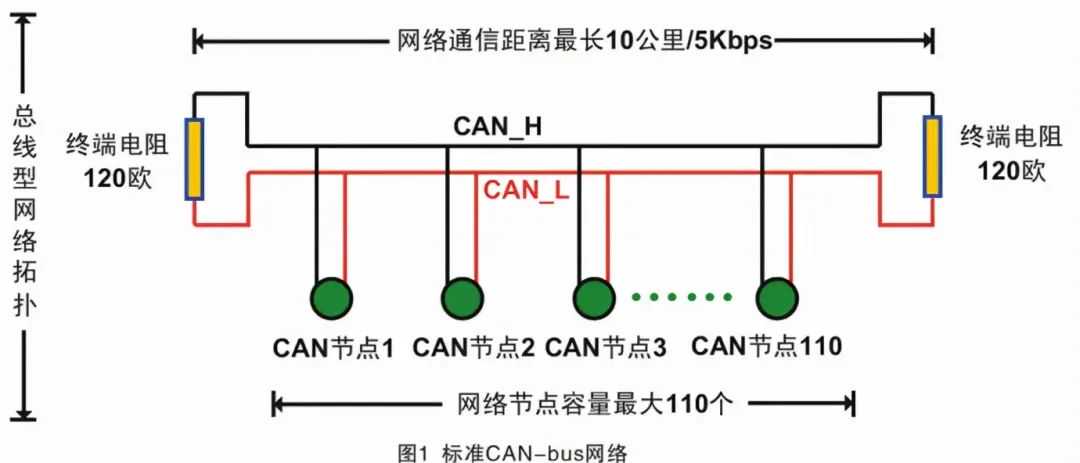
在CAN总线系统中,各个ECU通过双绞线(CAN_H和CAN_L)连接,每个单元都是独立的CAN节点。总线的两端要各接一个120Ω的电阻,用于匹配总线阻抗,吸收信号反射及回拨,从而提高数据通信的抗干扰能力及可靠性。
CAN总线组成
各个ECU通过判断CAN总线的电平,即可得到信号值。在CAN总线中,电平分为显性电平和隐性电平,显性电平表示”0“,此时,CAN_H比CAN_L电平高,分别为3.5V和1.5V,电位差为2V;隐形电平表示”1“,此时,CAN_H和CAN_L电压都为2.5V,电位差为0V。
CAN总线中的电平
CAN总线就是通过显性和隐性电平的变化来传输数据的。
数据从CAN总线起始节点发出,到达终点,各个ECU各取所需。就像一辆公交车,沿途经过各个站点。
因此,CAN总线也被形象地称为CAN-BUS总线。
CAN-BUS总线
CAN总线取代了昂贵而笨重的传统配电线束,降低了整车成本,传输效率更高,功能更加完善。
1986年2月,在底特律SAE大会上,CAN总线正式发布。
1987年,英特尔交付了第一款CAN控制器芯片82526,这是CAN协议的第一个硬件实现。从1983年到1987年,仅仅4年时间,一个想法就变成了现实。此后不久,飞利浦半导体推出了82C200。
1991年,奔驰500E成为世界上第一款搭载CAN总线的量产车型。同年,博世发布了标准,分为(11位标识符)和(29位标识符)。
1993年11月,国际标准化组织(ISO)发布了CAN标准ISO11898:1993,同时发布的还有ISO11519-2。这是世界上第一版CAN国际标准,随后进行了多次修订和演进。
ISO11898:1993同时定义了数据链路层和高速物理层,通俗的讲就是它规定了如何在电线上发送和接收数据,通信速度为5kbps-1Mbps(高速CAN)。
ISO11519-2则定义了通信速率在125kbps以下的通信标准(低速CAN),其通信速度相对较慢,但优点在于其对硬件的要求低、成本低。同时,该标准允许在CAN总线连接失败时通信得以继续进行,因此又叫容错CAN(LSFTCAN)。
从2003年开始,ISO11898CAN标准分离为ISO11898-1和ISO11898-2两部分,后续又发布了其他部分,并进行了整合。
在2016年之前,ISO11898涵盖6个部分,即:
(ISO11898-1-2003)
Part1:Datalinklayerandphysicalsignalling
(ISO11898-2-2003)
Part2:High-speedmediumaccessunit
(ISO11898-3-2006)
Part3:Low-speed,fault-tolerant,medium-depentinterface
(ISO11898-4-2004)
Part4:Time-triggeredcommunication
(ISO11898-5-2007)
Part5:High-speedmediumaccessunitwithlow-powermode
(ISO11898-6-2013)
Part6:High-speedmediumaccessunitwithselectivewake-upfunctionality
在2016年,其中的Part2、Part5、Part6被合并成了一个新的Part2,即:ISO11898-2-2016,原有的ISO11898-5-2007和ISO11898-6-2013被撤回。
值得一提的是ISO11898-3-2006的发布取代了最早发布的ISO11519-2,所以如今很多人没听过ISO11519。
行文至此,终于知道了ISO11898的来龙去脉,以及其与ISO11519的关联。
2.CAN诊断协议:汽车的“翻译官”
CAN通信协议只规定了信号的传输规则,实际上,从上个世纪90年代开始,汽车的电子化趋势越来越明显,各种传感器、执行器和控制单元的故障诊断成了一个大问题。
每个设备都有自己的诊断方法,这无形中增加了汽车维修的难度及成本。
为了解决这个问题,ISO组织于1991年开始研究诊断相关标准。
车辆的诊断过程也有类似的地方,外部诊断设备(Tester),通过汽车总线连接车辆,获取车辆各个ECU的状态信息,从而在不拆解车辆的情况下为车辆维修提供可靠的依据。
诊断时,Tester端与ECU端通过一问一答的形式进行通信,因此,需使用同样的“语言”——诊断协议。
1996年,最早的诊断协议ISO9141出现,该协议的典型特点是通信前需要双方建立握手协议,比较繁琐,随着技术的发展及时间的推移,该协议已经逐步退出历史舞台了。
到了1999年,ISO14230诞生,也就是常说的KWP2000(KeywordProtocol2000)。该协议实现了一套完整的车载诊断服务,最初使用K-Line(又叫K线)串行传输,最大通信速率10.4Kbps。现在已经没有多少车企应用此诊断协议了。
后来,基于CAN的KWP2000,即ISO15765于2001年出现了,最大速率可达1Mbps。
该协议包含如下几个部分:
同年,还出现了ISO15031,该协议与排放密切相关,且需要强制执行,具有法规效应,最初主要目的是环保。
该协议经过多年演变,最新版本包含如下几个部分:
到了2006年,我们熟知的ISO14229(UDS,UnifiedDiagnosticServices统一诊断服务)登场了!该协议只定义了诊断服务,只是一个应用层协议,不涉及网络,可以基于任意总线。
该协议经过多年发展和演变,包含如下几个部分:
如下是14229-1中的一张截图,我们可以更直观地看到14229、15765、11898之间的区别与联系。
3.SAEJ1939:大型车辆的“特使”
上述已经介绍了汽车上应用最广泛的CAN通信协议及诊断协议,那么SAEJ1939又是干什么的?
我们知道,ISO11898仅规定了CAN总线的物理层和数据链路层,应用层并未定义。
美国汽车工程师协会(SAE)为了实现总线协议体系的标准化,在的基础上制定了应用于大型货车和客车的协议,物理层、数据链路层基本上沿用了ISO11898规范,并增加了网络层、应用层和网络管理规范,所以,SAEJ1939便出现了。
SAEJ1939协议文档非常庞大,自成一体,常用部分如下:
该协议由SAE协会维护,目前在不断更新中,应用十分广泛,在商用车领域有着举足轻重的地位,而在乘用车领域一般则不使用。
J1939在乘用车领域未广泛使用的主要原因是乘用车产品更新迭代快、功能需求多样,采用自定义(应用层)的设计方式能最大程度发挥CAN网络设计灵活性,便于进行车型迭代升级。
一般的商用车功能需求单一,如果使用J1939协议,可以极大简化设计工作,且软件复用性高,节省开发成本。
但随着商用车越来越追求乘用车化,J1939协议可能需要持续更新,否则无法满足商用车日益增长的复杂功能需求。
此外,由于J1939标准化定义的特性,严格遵守J1939协议的车辆总线很容易被破解(通过ID可知晓发送节点及PGN,只要不是自定义的PGN,均可通过协议查找出报文名称及信号)。
结语
本文简要介绍了常见CAN通讯协议及诊断协议,只起到抛砖引玉的作用,由于篇幅所限,无法展开介绍,对某个协议感兴趣的读者,可自行下载研读。
获取方法:在后台直接发送对应标准的编号(如:11898),会弹出一个链接,点进去免费下载即可。
—END—