【STM32F103ZET6开发板】第2-12-2讲:通用定时器和高级定时器
通用定时器和高级定时器
实验目的掌握STM32通用定时器和高级定时器的原理。
掌握通用定时器和高级定时器输入捕获相关应用程序设计。
实验内容编写程序,配置通用定时器捕获通道,检测外部输入脉冲信号频率。编写程序,配置高级定时器捕获通道,检测外部输入脉冲信号频率。
硬件设计传感器输出信号介绍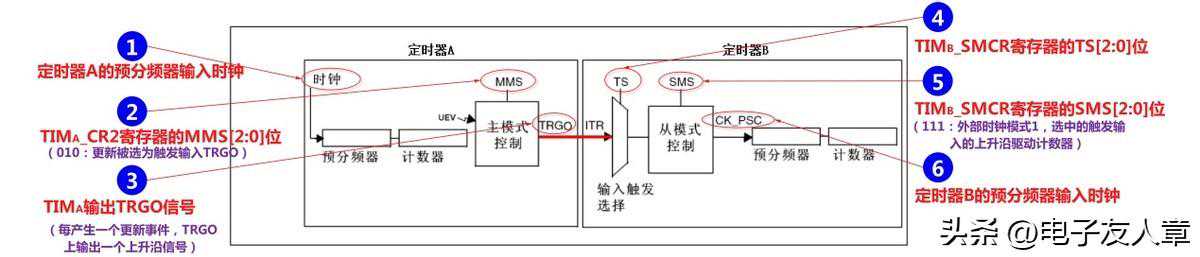
图1:常用传感器输出信号类型示意图
脉冲信号是一种离散信号,形状多种多样,与普通模拟信号(如正弦波)相比,波形之间在时间轴不连续(波形与波形之间有明显的间隔)但具有一定的周期性是它的特点。最常见的脉冲波是矩形波(也就是方波)。脉冲信号可以用来表示信息,也可以用来作为载波,比如脉冲调制中的脉冲编码调制(PCM),脉冲宽度调制(PWM)等等,还可以作为各种数字电路、高性能芯片的时钟信号。
STM32通用定时器和高级定时器具有输入捕获功能,利用该输入捕获功能可以测量一定量程范围的脉冲信号的脉宽和频率。
注:“频率”是指单位时间内周期变化的次数,与“模拟”或“数字”无关,所以在对频率型的模拟信号采集时需使用适宜的方案。
通用定时器(TIM2~TIM5)STM32F103系列MCU通用定时器是数量最多的定时器,举例STM32F103ZET6单片机的基本定时器和高级定时器各只有2个(基本定时器是TIM6和TIM7,高级定时器是TIM1和TIM8),通用定时器则包含TIM2~TIM5共4个定时器。针对超大容量的MCU,比如STM32F103ZGT6,通用定时器除了包含TIM2~TIM5,还有TIM9~TIM14。下面详细介绍通用定时器(TIM2~TIM5)。
通用定时器(TIM2~TIM5)内部结构图下面先介绍下STM32F103系列通用定时器(TIM2~TIM5)的内部结构图:
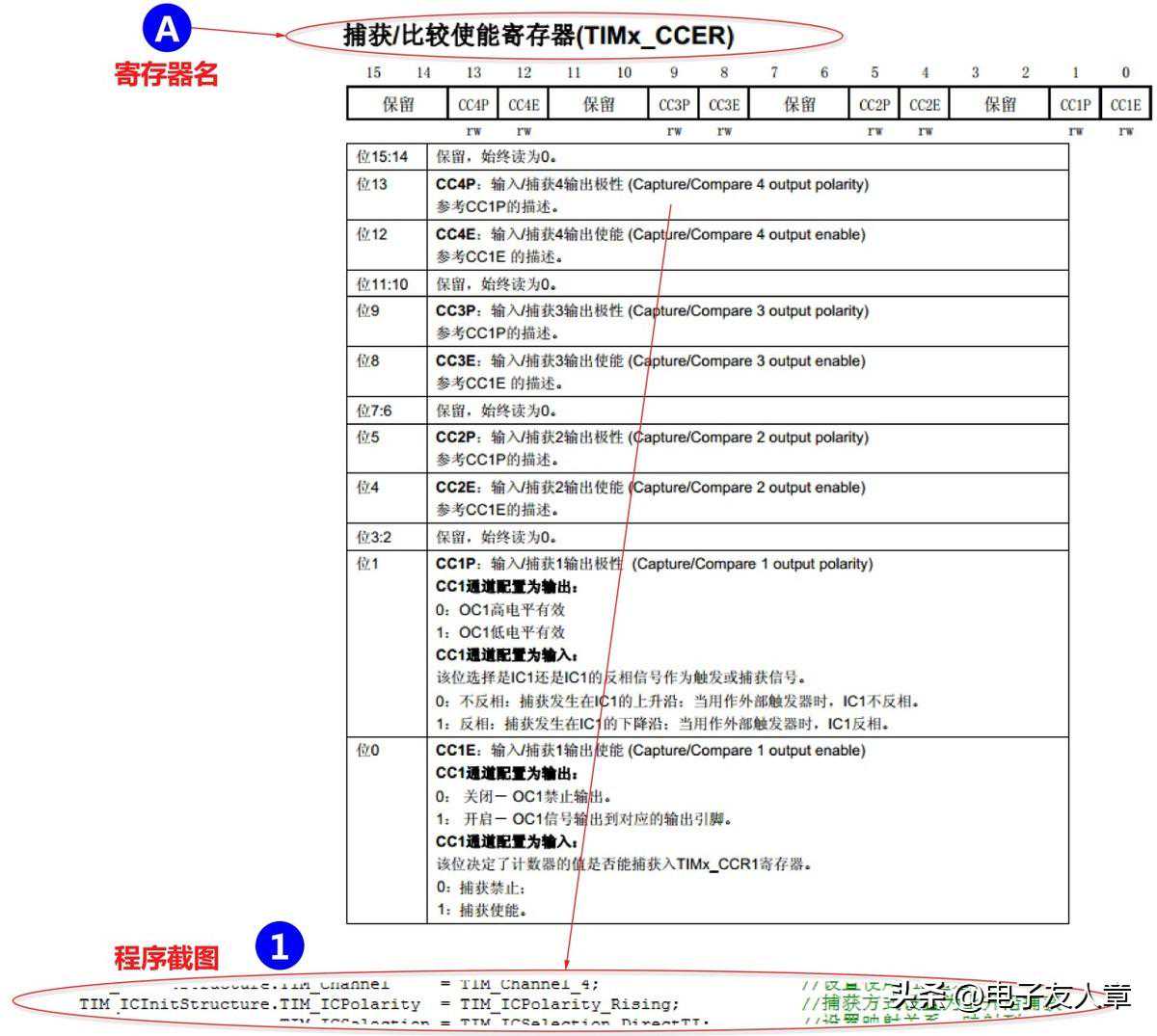
图2:STM32通用定时器内部结构图
通用定时器(TIM2~TIM5)时钟源外部输入脚作为通用定时器时钟源(手册上称为外部时钟模式1):
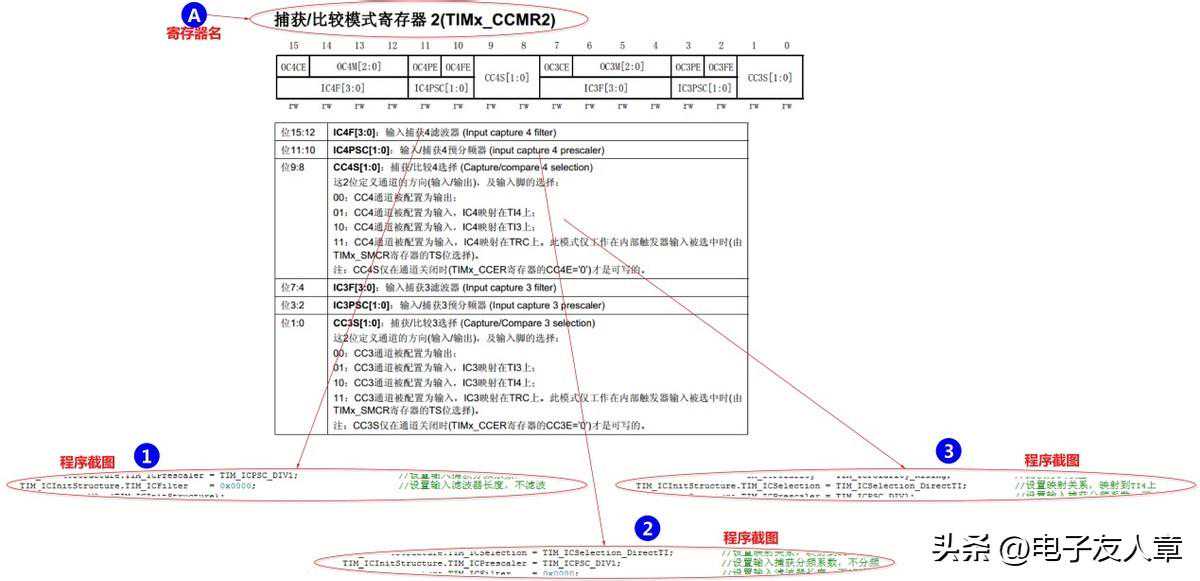
图3:通用定时器外部时钟模式1框图
外部触发输入作为通用定时器时钟源(手册上称为外部时钟模式2):
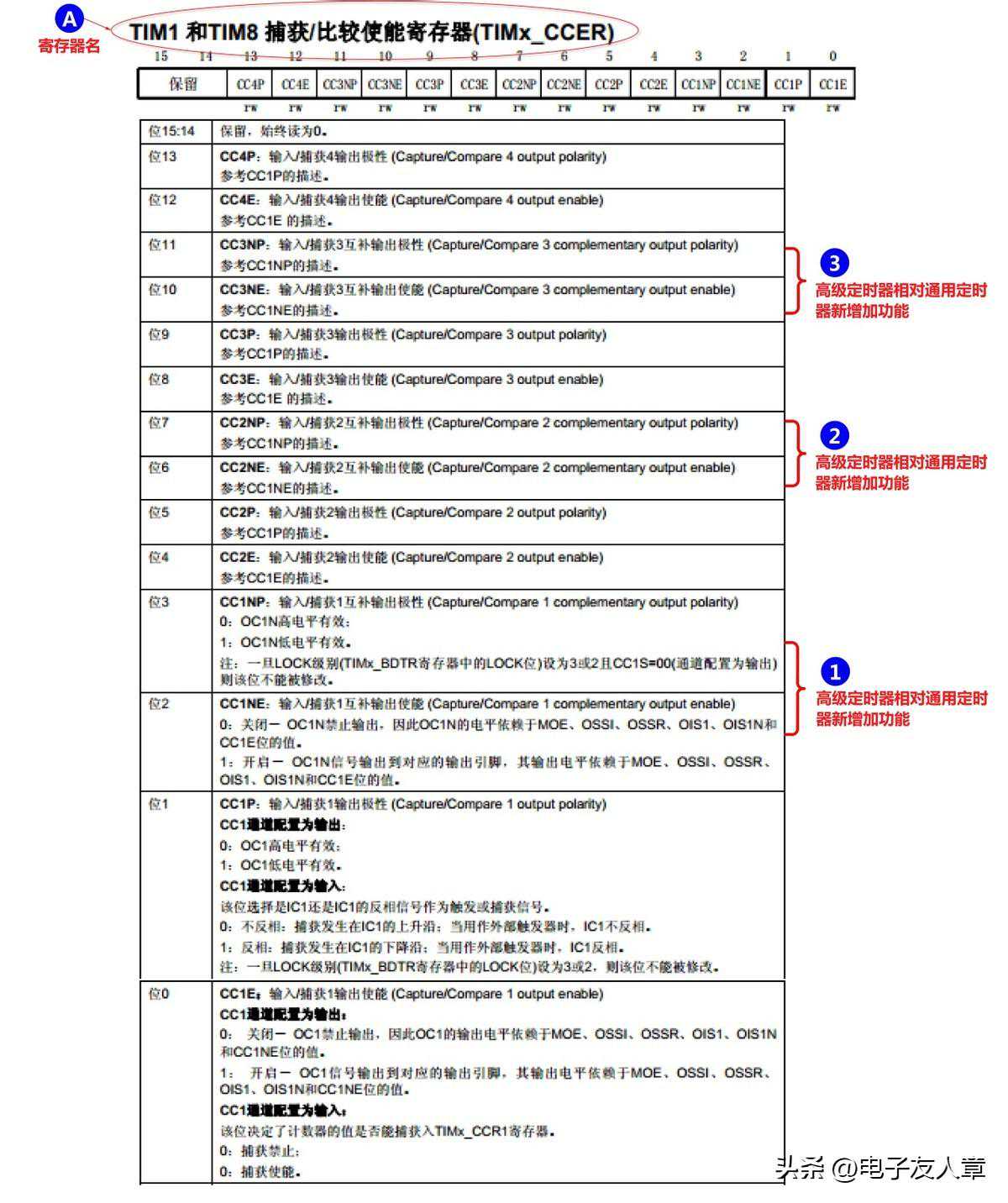
图4:通用定时器外部时钟模式2框图
内部触发输入作为通用定时器时钟源:使用一个定时器作为另一个定时器的预分频器。
下图示例使用定时器A作为定时器B的预分频器:

图5:定时器A作为定时器B的预分频器
定时器内部触发连接关系:

图6:定时器内部触发连接
注:假如选择的产品型号没有相应的定时器,那么对应的触发信号ITRx也不存在。
通用定时器(TIM2~TIM5)输入捕获通用定时器(TIM2~TIM5)输入捕获功能可以用来测量脉冲宽度或者测量频率。待测量的信号连接定时器通道(TIMx_CH1、TIMx_CH2、TIMx_CH3、TIMx_CH4),软件配置相关寄存器可对待测信号进一步处理,最后读取捕获寄存器值并按照一定的算法得出待测信号的脉冲宽度或频率。下图是通用定时器输入捕获的内部框图。
图7:通用定时器输入捕获的内部框图
注:定时器通道此时作为输入捕获时的输入通道使用,已使用引脚不可再作为输出比较的输出通道使用。
通用定时器(TIM2~TIM5)通道引脚分配
通用定时器(TIM2~TIM5)的输入捕获通道关联的MCU的哪些引脚,查阅芯片手册可知其对应关系。下表给出STM32F103ZET6通用定时器(TIM2~TIM5)4个定时器的通道引脚分配情况。
表1:STM32F103ZET6通用定时器通道引脚分配
序号
TIM
复用功能
对应IO口
功能描述
备注
1
TIM2
TIM2_CH1
PA0
TIM2通道1
1、TIM2_ETR是外部触发输入,用于为TIM2提供时钟源。
2
PA15
3
TIM2_CH2
PA1
TIM2通道2
4
PB3
5
TIM2_CH3
PA2
TIM2通道3
6
PB10
7
TIM2_CH4
PA3
TIM2通道3
8
PB11
9
TIM2_ETR
PA0
TIM2外部触发输入
10
PA15
11
TIM3
TIM3_CH1
PA6
TIM3通道1
1、TIM3_ETR是外部触发输入,用于为TIM3提供时钟源。
12
PC6
13
PB4
14
TIM3_CH2
PA7
TIM3通道2
15
PC7
16
PB5
17
TIM3_CH3
PB0
TIM3通道3
18
PC8
19
TIM3_CH4
PB1
TIM3通道4
20
PC9
21
TIM3_ETR
PD2
TIM3外部触发输入
22
TIM4
TIM4_CH1
PB6
TIM4通道1
1、TIM4_ETR是外部触发输入,用于为TIM4提供时钟源。
23
PD12
24
TIM4_CH2
PB7
TIM4通道2
25
PD13
26
TIM4_CH3
PB8
TIM4通道3
27
PD14
28
TIM4_CH4
PB9
TIM4通道4
29
PD15
30
TIM4_ETR
PE0
TIM4外部触发输入
31
TIM5
TIM5_CH1
PA0
TIM5通道1
32
TIM5_CH2
PA1
TIM5通道2
33
TIM5_CH3
PA2
TIM5通道3
34
TIM5_CH4
PA3
TIM5通道4
注:
上表中的对应IO口只是代表MCU的引脚,一旦该引脚作为通用定时器通道使用就不再是普通的GPIO了。
后面会介绍通用定时器通道作为输出比较使用的情况,对应MCU引脚亦如上表。
通用定时器每个定时器都有4个通道,有的通道可选择映射到不同的MCU引脚上。
通用定时器(TIM2~TIM5)频率检测原理
下面以一个简单的脉冲信号输入为例,简单地讲述下输入捕获用于频率测量的工作原理。艾克姆科技提供的例程便是基于这个原理的。
图8:定时器内部触发连接
注:设置通用定时器输入捕获为下降沿,原理是一样的,公式计算亦是相同。
通用定时器(TIM2~TIM5)脉冲宽度检测原理
同理,对于一个简单的脉冲输入,当测量其脉冲宽度时,工作原理如下图。
图9:定时器内部触发连接
注:基于这个原理艾克姆科技没有提供相应的例程,用户请参考频率测量部分设计程序。
通用定时器(TIM2~TIM5)输出比较通用定时器(TIM2~TIM5)除输入捕获功能外,还具有输出比较功能。此时,通用定时器(TIM2~TIM5)通道作为输出比较输出使用。下图是输出比较功能框图。
图10:通用定时器输出比较的内部框图
注:通用定时器输出比较功能将在下一讲中详述。
高级定时器介绍前面介绍了STM32F103系列MCU基本定时器和通用定时器,接下来介绍功能最强大、内部结构也是最复杂的高级定时器。高级定时器功能包括:定时、输入捕获、输出比较和死区控制。STM32F103ZET6具有的高级定时器外设有TIM1和TIM8,其内部结构图如下:
图11:STM32高级定时器内部结构图
高级定时器(TIM1,TIM8)通道引脚分配高级定时器(TIM1,TIM8)的输入捕获通道关联的MCU引脚分配情况如下表。
表2:STM32F103ZET6高级定时器相关引脚分配
序号
TIM
复用功能
对应IO口
功能描述
备注
1
TIM1
TIM1_CH1
PA8
TIM1通道1
1、TIM1_ETR是外部触发输入,用于为TIM1提供时钟源。
2、TIM1_BKIN是外部输入故障信号,可用来关闭TIM1输出。
2
PE9
3
TIM1_CH1N
PA7
TIM1通道1的互补输出
4
PB13
5
PE8
6
TIM1_CH2
PA9
TIM1通道2
7
PE11
8
TIM1_CH2N
PB0
TIM1通道2的互补输出
9
PB14
10
PE10
11
TIM1_CH3
PA10
TIM1通道3
12
PE13
13
TIM1_CH3N
PB1
TIM1通道3的互补输出
14
PB15
15
PE12
16
TIM1_CH4
PA11
TIM1通道4
17
PE14
18
TIM1_ETR
PA12
TIM1外部触发输入
19
PE7
20
TIM1_BKIN
PA6
TIM1外部输入故障信号
21
PB12
22
PE15
23
TIM8
TIM8_CH1
PC6
TIM8通道1
1、TIM8_ETR是外部触发输入,用于为TIM8提供时钟源。
2、TIM8_BKIN是外部输入故障信号,可用来关闭TIM8输出。
24
TIM8_CH1N
PA7
TIM8通道1的互补输出
25
TIM8_CH2
PC7
TIM8通道2
26
TIM8_CH2N
PB0
TIM8通道2的互补输出
27
TIM8_CH3
PC8
TIM8通道3
28
TIM8_CH3N
PB1
TIM8通道3的互补输出
29
TIM8_CH4
PC9
TIM8通道4
30
TIM8_ETR
PA0
TIM8外部触发输入
31
TIM8_BKIN
PA6
TIM8外部输入故障信号
注:STM32F103系列MCU高级定时器相对通用定时器多了通道的互补输出,而不使用通道互补输出的话,高级定时器在使用和通用定时器相同功能时原理和使用方法是一样的。
高级定时器(TIM1,TIM8)通道功能高级定时器(TIM1,TIM8)通道的输入捕获也可以测量脉冲宽度和频率,原理与通用定时器一样。
关于高级定时器(TIM1,TIM8)通道输出比较、互补输出功能也在下一讲中介绍。
软件设计通用定时器寄存器汇集STM32F103提供了18个用于操作通用TIM的寄存器,如下表所示:
表3:通用TIM相关寄存器
序号
寄存器名
读/写
功能描述
1
TIMx_CR1
读/写
TIMx控制寄存器1。
2
TIMx_CR2
读/写
TIMx控制寄存器2。
3
TIMx_SMCR
读/写
TIMx从模式控制寄存器。
4
TIMx_DIER
读/写
TIMxDMA/中断使能寄存器。
5
TIMx_SR
读/写
TIMx状态寄存器。
6
TIMx_EGR
读/写
TIMx事件产生寄存器。
7
TIMx_CCMR1
读/写
TIMx捕获/比较模式寄存器1。
8
TIMx_CCMR2
读/写
TIMx捕获/比较模式寄存器2。
9
TIMx_CCER
读/写
TIMx捕获/比较使能寄存器。
10
TIMx_CNT
读/写
TIMx计数器。
11
TIMx_PSC
读/写
TIMx预分频器。
12
TIMx_ARR
读/写
TIMx自动重装载寄存器。
13
TIMx_CCR1
读/写
TIMx捕获/比较寄存器1。
14
TIMx_CCR2
读/写
TIMx捕获/比较寄存器2。
15
TIMx_CCR3
读/写
TIMx捕获/比较寄存器3。
16
TIMx_CCR4
读/写
TIMx捕获/比较寄存器4。
17
TIMx_DCR
读/写
TIMxDMA控制寄存器。
18
TIMx_DMAR
读/写
TIMx连续模式的DMA地址寄存器。
注:上述粗体部分强调的寄存器代表通用定时器比基本定时器多的部分,当然基本定时器有的寄存器不代表寄存器每一位和通用定时器都相同。
关于TIM_ICInitTypeDef结构体:
TIM_ICInitTypeDef结构体定义如下图,基本定时器是没有输入捕获功能的,故这个结构图是针对通用定时器和高级定时器声明的。
图12:TIM_ICInitTypeDef结构体
关于TIMx_CCER寄存器:
TIMx_CCER寄存器是捕获/比较使能寄存器,可对通用定时器4个通道进行配置。因定时器具有输入捕获和输出比较功能,该寄存器介绍时分通道是用于输入捕获或是输出比较描述。通道作为输入捕获时,该寄存器可设置捕获方式和是否使能通道;通道作为输出比较时,该寄存器可设置对应通道OC有效电平和OC输出与否。
图13:TIMx_CCER寄存器
注:高级定时器的捕获/比较使能寄存器已有位功能一致,保留位新增互补输出特性。
关于TIMx_CCMR1寄存器:
TIMx_CCMR1寄存器是捕获/比较模式寄存器1,可对通用定时器通道1和通道2进行配置。寄存器描述时分通道是用于输入捕获或是输出比较进行。下面针对通道作为输入捕获时,该寄存器用于设置通道1和通道2的映射关系、捕获预分频和输入滤波器。
图14:TIMx_CCMR1寄存器
关于TIMx_CCMR2寄存器:
TIMx_CCMR2寄存器是捕获/比较模式寄存器2,可对通用定时器通道3和通道4进行配置。寄存器描述时分通道是用于输入捕获或是输出比较进行。下面针对通道作为输入捕获时,该寄存器用于设置通道3和通道4的映射关系、捕获预分频和输入滤波器。
图15:TIMx_CCMR2寄存器
其他寄存器详细的描述在这里不做具体的介绍,大家可以参考目录:“第1部分:开发板硬件资料”“2-芯片资料”中“STM32英文参考手册_V15”或“STM32中文参考手册_V10”对应的通用定时器章节的寄存器部分认真研读。
高级定时器寄存器汇集STM32F103提供了19个用于操作高级TIM的寄存器,如下表所示:
表4:高级TIM相关寄存器
序号
寄存器名
读/写
功能描述
1
TIMx_CR1
读/写
TIM1和TIM8控制寄存器1。
2
TIMx_CR2
读/写
TIM1和TIM8控制寄存器2。
3
TIMx_SMCR
读/写
TIM1和TIM8从模式控制寄存器。
4
TIMx_DIER
读/写
TIM1和TIM8DMA/中断使能寄存器。
5
TIMx_SR
读/写
TIM1和TIM8状态寄存器。
6
TIMx_EGR
读/写
TIM1和TIM8事件产生寄存器。
7
TIMx_CCMR1
读/写
TIM1和TIM8捕获/比较模式寄存器1。
8
TIMx_CCMR2
读/写
TIM1和TIM8捕获/比较模式寄存器2。
9
TIMx_CCER
读/写
TIM1和TIM8捕获/比较使能寄存器。
10
TIMx_CNT
读/写
TIM1和TIM8计数器。
11
TIMx_PSC
读/写
TIM1和TIM8预分频器。
12
TIMx_ARR
读/写
TIM1和TIM8自动重装载寄存器。
13
TIMx_RCR
读/写
TIM1和TIM8重复计数寄存器。
14
TIMx_CCR1
读/写
TIM1和TIM8捕获/比较寄存器1。
15
TIMx_CCR2
读/写
TIM1和TIM8捕获/比较寄存器2。
16
TIMx_CCR3
读/写
TIM1和TIM8捕获/比较寄存器3。
17
TIMx_CCR4
读/写
TIM1和TIM8捕获/比较寄存器4。
18
TIMx_BDTR
读/写
TIM1和TIM8刹车和死区寄存器。
19
TIMx_DCR
读/写
TIM1和TIM8DMA控制寄存器。
20
TIMx_DMAR
读/写
TIM1和TIM8连续模式的DMA地址寄存器。
注:上述粗体部分强调的寄存器代表高级定时器比通用定时器多的寄存器,但高级定时器和通用定时器都有的寄存器不代表寄存器每一位都相同。
关于TIMx_CCER寄存器:
TIMx_CCER寄存器是捕获/比较使能寄存器,可对高级定时器4个通道进行配置。通用定时器的TIMx_CCER寄存器的位2、位3、位6、位7、位10、位11都是保留位,在高级定时器的TIMx_CCER寄存器中,这些位都有了新的含义。需要说明的是,高级定时器的TIMx_CCER寄存器其他位与CCER寄存器的已定义位含义相同。
图16:TIMx_CCER寄存器
注:高级定时器的捕获/比较使能寄存器已有位功能一致,保留位新增互补输出特性。
其他寄存器详细的描述在这里不做具体的介绍,大家可以参考目录:“第1部分:开发板硬件资料”“2-芯片资料”中“STM32英文参考手册_V15”或“STM32中文参考手册_V10”对应的高级定时器章节的寄存器部分认真研读。
输入捕获配置过程针对STM32F103的基本定时器,软件的配置过程一般如下:
图17:输入捕获配置步骤
通用定时器输入捕获实验注:本节的实验源码是在“实验2-12-2:基本定时器中断”的基础上修改。本节对应的实验源码是:“实验2-12-5:通用定时器输入捕获”。
工程需要用到的库文件本例需要用到的c文件如下表所示,工程需要添加下表中的c文件。
表5:实验需要用到的c文件
序号
文件名
后缀
功能描述
1
stm32f10x_rcc
.c
复位与时钟控制器。
2
stm32f10x_gpio
.c
通用输入输出。
3
stm32f10x_tim
.c
定时器。
4
misc
.c
中断向量控制器。
5
stm32f10x_usart
.c
通用同步/异步收发器。
按下图所示将需要的c文件添加到工程。
图18:在新建工程中添加所需库函数c文件
头文件引用和路径设置需要引用的头文件
因为在“”文件中使用了标准库和我们自己建的软件延时函数,所以需要引用下面的头文件。
include""
需要包含的头文件路径
本例需要包含的头文件路径如下表:
表6:头文件包含路径
序号
路径
描述
1
..\Lib\F10x_FWLIB\inc
标准库头文件路径。
2
..\User
stm32f10x_头文件在该路径,所以要包含。
3
..\User\bsp
自建的板卡相关的驱动文件路径。
图19:添加头文件包含路径
编写代码首先是对TIM2定时器进行初始化操作,并配置TIM2_CH4为输入捕获通道,具体代码如下。
代码清单:TIM2定时器初始化
/************************************************************************
*描述:初始化TIM2并配置TIM2_CH4输入捕获功能
*入参:无
*返回值:无
***********************************************************************/
voidTIM2_Init(void)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseInitStruct;
TIM_ICInitTypeDefTIM_ICInitStructure;
NVIC_InitTypeDefNVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//打开外设TIM2时钟
TIM_DeInit(TIM2);//将外设TIM2寄存器重设为缺省值
//TIM2是通用定时器,需配置TIM_ClockDivision、TIM_CounterMode、TIM_Period和TIM_Prescaler,无需配置TIM_RepetitionCounter
TIM__ClockDivision=TIM_CKD_DIV1;//设置了时钟分割(Tck_tim)
TIM__CounterMode=TIM_CounterMode_Up;//选择了计数器模式(TIM向上计数模式)
TIM__Period=9999;//设定计数器自动重装值,取值范围0x0000~0xFFFF
TIM__Prescaler=7199;//设置用来作为TIM2时钟频率除数的预分频值为(7199+1),取值范围0x0000~0xFFFF
TIM_TimeBaseInit(TIM2,TIM_TimeBaseInitStruct);
TIM__Channel=TIM_Channel_4;//设置使用TIM通道4
TIM__ICPolarity=TIM_ICPolarity_Rising;//捕获方式设置为上升沿捕获
TIM__ICSelection=TIM_ICSelection_DirectTI;//设置映射关系,映射到TI4上
TIM__ICPrescaler=TIM_ICPSC_DIV1;//设置输入捕获分频系数,不分频
TIM__ICFilter=0x0000;//设置输入滤波器长度,不滤波
TIM_ICInit(TIM2,TIM_ICInitStructure);
TIM_Cmd(TIM2,ENABLE);//使能TIM2外设
TIM_ITConfig(TIM2,TIM_IT_CC4,ENABLE);//使能TIM2的TIM_IT_CC4捕获中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//NVIC_Group:先占优先级2位,从优先级2位
NVIC__IRQChannel=TIM2_IRQn;//配置为TIM2中断
NVIC__IRQChannelPreemptionPriority=1;//先占优先级为1
NVIC__IRQChannelSubPriority=2;//从优先级为2
NVIC__IRQChannelCmd=ENABLE;//使能中断通道
NVIC_Init(NVIC_InitStructure);
}
然后,捕获通道满足上升沿捕获的中断条件会进入到中断服务函数,根据输入捕获测量频率的原理,可计算出频率值。每计算出一次频率值指示灯D1翻转一次。
代码清单:TIM2中断服务函数
/*************************************************************************
*描述:TIM2中断服务函数
*入参:无
*返回值:无
*************************************************************************/
voidTIM2_IRQHandler(void)
{
staticuint16_tCapture,IC4ReadValue1,IC4ReadValue2;
staticuint8_tCaptureNumber=0;
if(TIM_GetITStatus(TIM2,TIM_IT_CC4)==SET)
{
TIM_ClearITPingBit(TIM2,TIM_IT_CC4);//清除TIM2的中断待处理位
if(CaptureNumber==0)
{
IC4ReadValue1=TIM_GetCapture4(TIM2);//获得输入捕获4的值
CaptureNumber=1;
}
elseif(CaptureNumber==1)
{
IC4ReadValue2=TIM_GetCapture4(TIM2);//再次获得输入捕获4的值
if(IC4ReadValue2IC4ReadValue1)//第2次获得输入捕获4的值大于第1次获得输入捕获4的值
{
Capture=(IC4ReadValue2-IC4ReadValue1);//捕获间隔内(一个周期)计数器计数次数
}
else//第2次获得输入捕获4的值不大于第1次获得输入捕获4的值
{
Capture=((0xFFFF-IC4ReadValue1)+1+IC4ReadValue2);//捕获间隔超一个周期计数器计数次数
}
Freq=(uint32_t)((SystemCoreClock/7200)/Capture);//频率计算
CaptureNumber=0;
led_toggle(LED_1);//翻转指示灯D1
}
}
}
最后,主函数中初始化指示灯、串口1和TIM2定时器,主循环中1.5s串口发送一次最新采集的频率值,代码如下。
代码清单:主函数
intmain(void)
{
//初始化用于驱动指示灯D1、D2、D3、D4的引脚,并熄灭4个用户LED
leds_init();
//初始化USART1并配置USART1中断优先级
USART1_Init();
//初始化TIM2并配置TIM2_CH4输入捕获功能
TIM2_Init();
//主循环
while(1)
{
printf("\r\nF=%dHZ\r\n",Freq);//实时读取频率值,并将频率值串口打印出来
sw_delay_ms(1500);//1.5s读取一次频率值
}
}
实验步骤解压“…\第3部分:标准库教程和实验源码\1-基础实验程序\”目录下的压缩文件“实验2-12-5:通用定时器输入捕获”,将解压后得到的文件夹拷贝到合适的目录,如“D\STM32F103ZET6”。
启动。
在MDK5中执行“Project→OpenProject”打开“…\TIM\projec”目录下的工程“”。
程序运行后,给TIM2的通道4(即PA3口)输入脉冲信号,打开串口调试助手选择正确的串口号,波特率设置为19200,数据位为8、停止位为1,可以观察到串口调试助手每1.5s显示一次读取到的频率信息。可观察用户指示灯D1不断闪烁。
图20:频率测量实验现象截图
高级定时器输入捕获实验注:本节的实验源码是在“实验2-12-5:通用定时器输入捕获”的基础上修改。本节对应的实验源码是:“实验2-12-6:高级定时器输入捕获”。
工程需要用到的库文件在使用库函数建“实验2-12-6:高级定时器输入捕获”工程时,需要用到的c文件以及添加头文件包含路径的方法与介绍“实验2-12-5:通用定时器输入捕获”完全一样。
编写代码首先是对TIM1定时器进行初始化操作,并配置TIM1_CH4为输入捕获通道,具体代码如下。
代码清单:TIM1定时器初始化
/***********************************************************************
*描述:初始化TIM1并配置TIM1_CH4捕获功能
*入参:无
*返回值:无
************************************************************************/
voidTIM1_Init(void)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseInitStruct;
TIM_ICInitTypeDefTIM_ICInitStructure;
NVIC_InitTypeDefNVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);//打开外设TIM1时钟
TIM_DeInit(TIM1);//将外设TIM1寄存器重设为缺省值
//TIM1是高级定时器,需配置TIM_ClockDivision、TIM_CounterMode、TIM_Period、TIM_Prescaler和TIM_RepetitionCounter
TIM__ClockDivision=TIM_CKD_DIV1;//设置了时钟分割(Tck_tim)
TIM__CounterMode=TIM_CounterMode_Up;//选择了计数器模式(TIM向上计数模式)
TIM__Period=9999;//设定计数器自动重装值,取值范围0x0000~0xFFFF
TIM__Prescaler=7199;//设置用来作为TIM1时钟频率除数的预分频值为(7199+1),取值范围0x0000~0xFFFF
TIM__RepetitionCounter=0;//设置重复溢出多少次才会进一次溢出中断
TIM_TimeBaseInit(TIM1,TIM_TimeBaseInitStruct);
TIM__Channel=TIM_Channel_4;//设置使用TIM通道4
TIM__ICPolarity=TIM_ICPolarity_Rising;//捕获方式设置为上升沿捕获
TIM__ICSelection=TIM_ICSelection_DirectTI;//设置映射关系,映射到TI4上
TIM__ICPrescaler=TIM_ICPSC_DIV1;//设置输入捕获分频系数,不分频
TIM__ICFilter=0x0000;//设置输入滤波器长度,不滤波
TIM_ICInit(TIM1,TIM_ICInitStructure);
TIM_Cmd(TIM1,ENABLE);//使能TIM1外设
TIM_ITConfig(TIM1,TIM_IT_CC4,ENABLE);//使能TIM1的TIM_IT_CC4捕获中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//NVIC_Group:先占优先级2位,从优先级2位
NVIC__IRQChannel=TIM1_CC_IRQn;//配置为TIM1中断
NVIC__IRQChannelPreemptionPriority=1;//先占优先级为1
NVIC__IRQChannelSubPriority=2;//从优先级为2
NVIC__IRQChannelCmd=ENABLE;//使能中断通道
NVIC_Init(NVIC_InitStructure);
}
然后,捕获通道满足上升沿捕获的中断条件会进入到中断服务函数,根据输入捕获测量频率的原理,可计算出频率值。每计算出一次频率值指示灯D1翻转一次。
代码清单:TIM1中断服务函数
/**************************************************************************
*描述:TIM1中断服务函数
*入参:无
*返回值:无
*************************************************************************/
voidTIM1_CC_IRQHandler(void)
{
staticuint16_tCapture,IC4ReadValue1,IC4ReadValue2;
staticuint8_tCaptureNumber=0;
if(TIM_GetITStatus(TIM1,TIM_IT_CC4)==SET)
{
TIM_ClearITPingBit(TIM1,TIM_IT_CC4);//清除TIM1的中断待处理位
if(CaptureNumber==0)
{
IC4ReadValue1=TIM_GetCapture4(TIM1);//获得输入捕获4的值
CaptureNumber=1;
}
elseif(CaptureNumber==1)
{
IC4ReadValue2=TIM_GetCapture4(TIM1);//再次获得输入捕获4的值
if(IC4ReadValue2IC4ReadValue1)//第2次获得输入捕获4的值大于第1次获得输入捕获4的值
{
Capture=(IC4ReadValue2-IC4ReadValue1);//捕获间隔内(一个周期)计数器计数次数
}
else//第2次获得输入捕获4的值不大于第1次获得输入捕获4的值
{
Capture=((0xFFFF-IC4ReadValue1)+1+IC4ReadValue2);//捕获间隔超一个周期计数器计数次数
}
Freq=(uint32_t)((SystemCoreClock/7200)/Capture);//频率计算
CaptureNumber=0;
led_toggle(LED_1);//翻转指示灯D1
}
}
}
最后,主函数中初始化指示灯、串口1和TIM1定时器,主循环中1.5s串口发送一次最新采集的频率值,代码如下。
代码清单:主函数
intmain(void)
{
//初始化用于驱动指示灯D1、D2、D3、D4的引脚,并熄灭4个用户LED
leds_init();
//初始化USART1并配置USART1中断优先级
USART1_Init();
//初始化TIM1并配置TIM1_CH4输入捕获功能
TIM1_Init();
//主循环
while(1)
{
printf("\r\nF=%dHZ\r\n",Freq);//实时读取温度值,并将温度值串口打印出来
sw_delay_ms(1500);//1.5s读取一次温度值
}
}
实验步骤解压“…\第3部分:标准库教程和实验源码\1-基础实验程序\”目录下的压缩文件“实验2-12-6:高级定时器输入捕获”,将解压后得到的文件夹拷贝到合适的目录,如“D\STM32F103ZET6”。
启动。
在MDK5中执行“Project→OpenProject”打开“…\TIM\projec”目录下的工程“”。
程序运行后,给TIM1的通道4(即PA11口)输入脉冲信号,打开串口调试助手选择正确的串口号,波特率设置为19200,数据位为8、停止位为1,可以观察到串口调试助手每1.5s显示一次读取到的频率信息。可观察用户指示灯D1不断闪烁。
图21:频率测量实验现象截图